

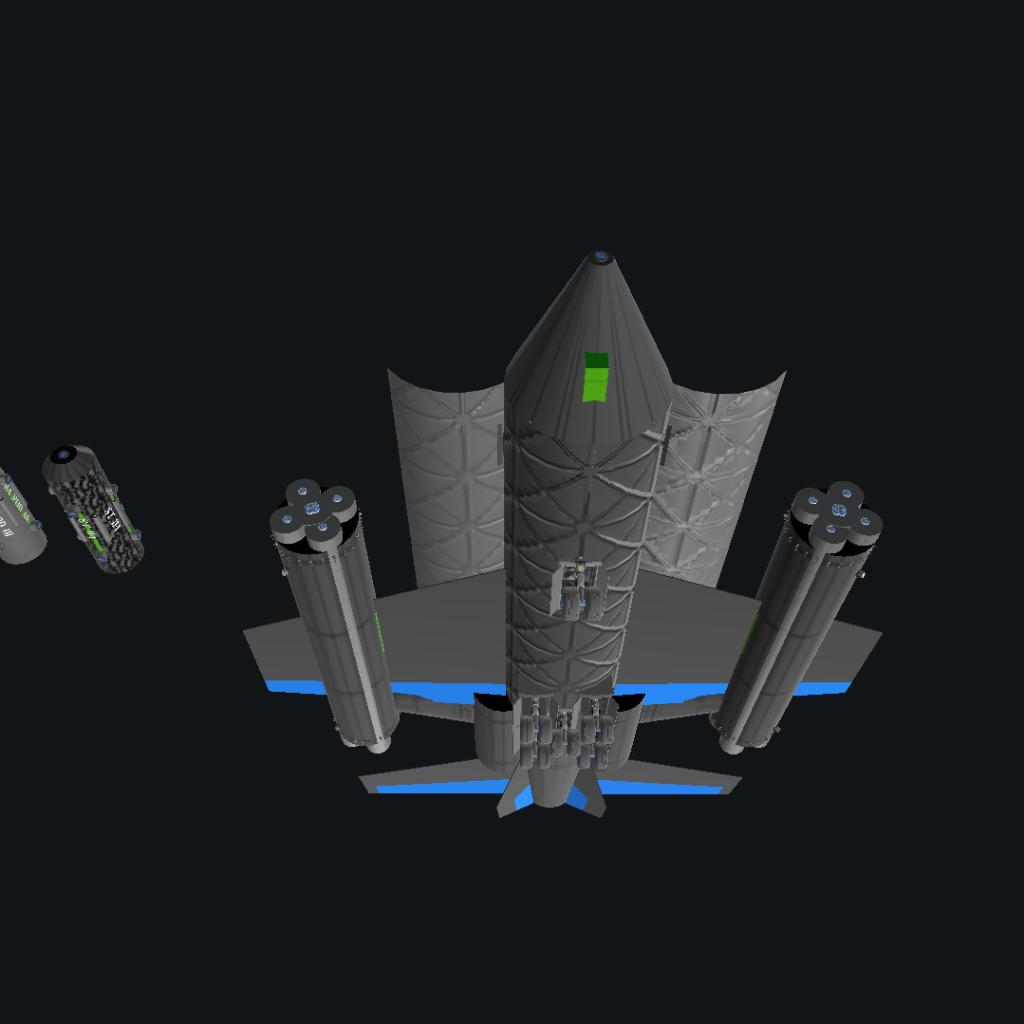
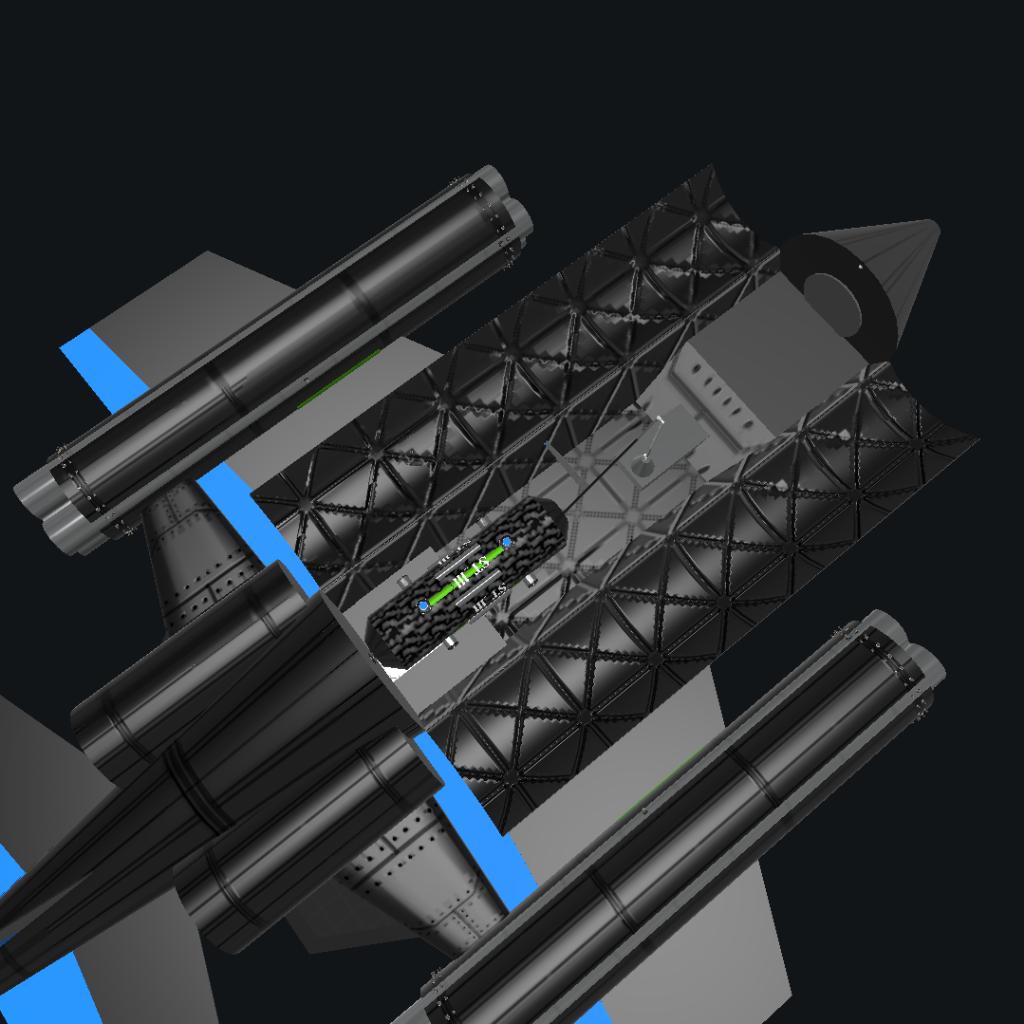
A simple building platform te setup stations up there ;)
that has NewHope II ,at it's core .
Slider_1 wont be useful now as " ShiftingGear " it is not implemented .
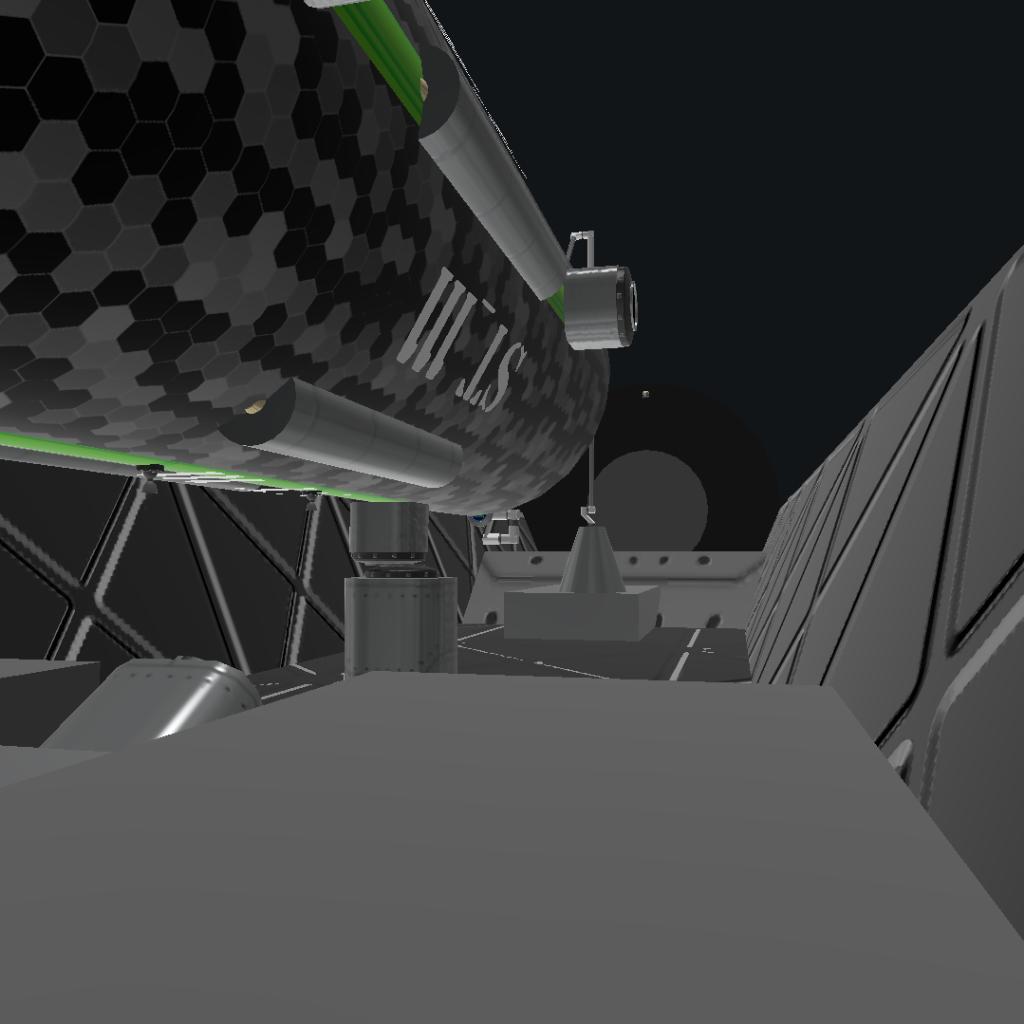
The robot arm should place it self in liftoff position ,
at the beginning of flight . To get in control of it u need to take ctrl of CPU at its base .
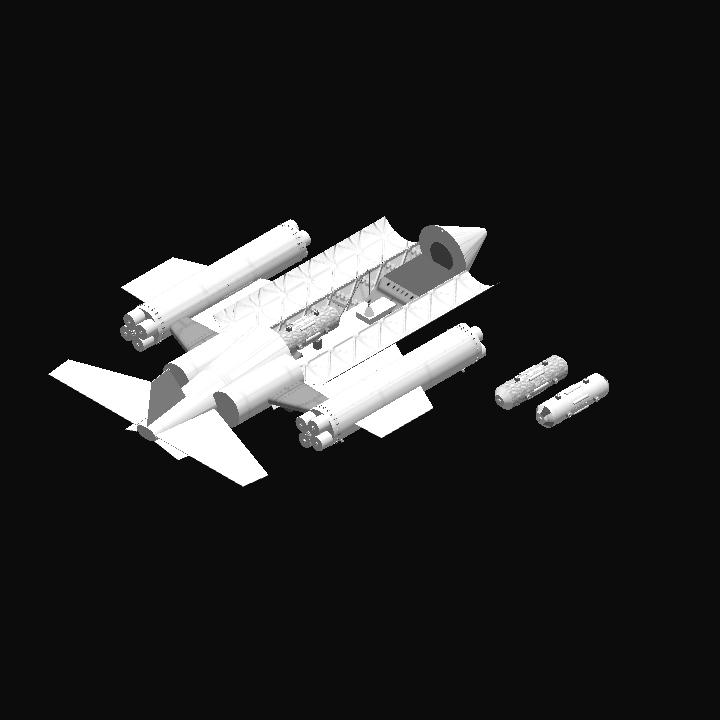
The cargo ,one of station modules ... ( uploaded with shp )
Can be anything that suit you're needs .
A great thanks goes to plane918273645 for his remarcabile robotic arm .
Here is e link to it https://www.simplerockets.com/c/8f3QHx/Advanced-robot-arm-3-0-Vizzy ...
Another big Thanks for ideas goes to MrProfessor ,thancks 4 the reactors idea ,
https://www.simplerockets.com/c/2qvt29/Armatech-RTG-Nuclear-reactor ...
On the same principle an ion eng is becameing an fuel scoop :) .
The ship has to . exercise caution upon usage ,it destabilize the ship
on high power (throttle at max setting ) .
This pretty much sums up .
Enjoy !!
GENERAL INFO
- Created On: Android
- Game Version: 0.9.704.0
- Price: $1,748,686k
- Number of Parts: 670
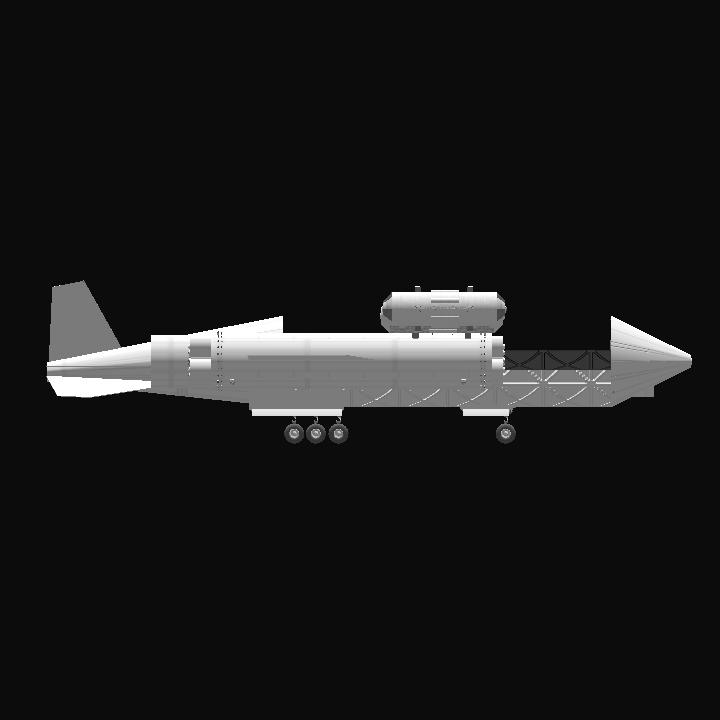
- Dimensions: 19 m x 58 m x 76 m
PERFORMANCE
- Total Delta V: 0m/s
- Total Thrust: -5,839,905,619,968N
- Engines: 37
- Wet Mass: 1.4E+5kg
- Dry Mass: -7,118,382,696,497,150kg
STAGES
| Stage | Engines | Delta V | Thrust | Burn | Mass |
|---|---|---|---|---|---|
| 1 | 36 | 0m/s | -5,839,906,668,544N | 0s | 1.31E+5kg |
4 Comments
- Log in to leave a comment
-
135 WestlandPinned 4.8 years ago
Before launching save station modules as custom parts :) Enjoy the trip !!
-
135 WestlandPinned 4.8 years ago
Upon switching between shp ctrl and arm ctrl , don't let the "auto pilot " manage shp attitude ...
just position the shp ,set ctrls to rcs mode and than switch to arm ctrl .
Otherwise shp will rotate in accordance with new controller orientation ...Be advised !! docking ports ,aka " SaftyClamps " are controlled from arm controller
AG-s 4 and 5 ,and arm head is AG-7 ...
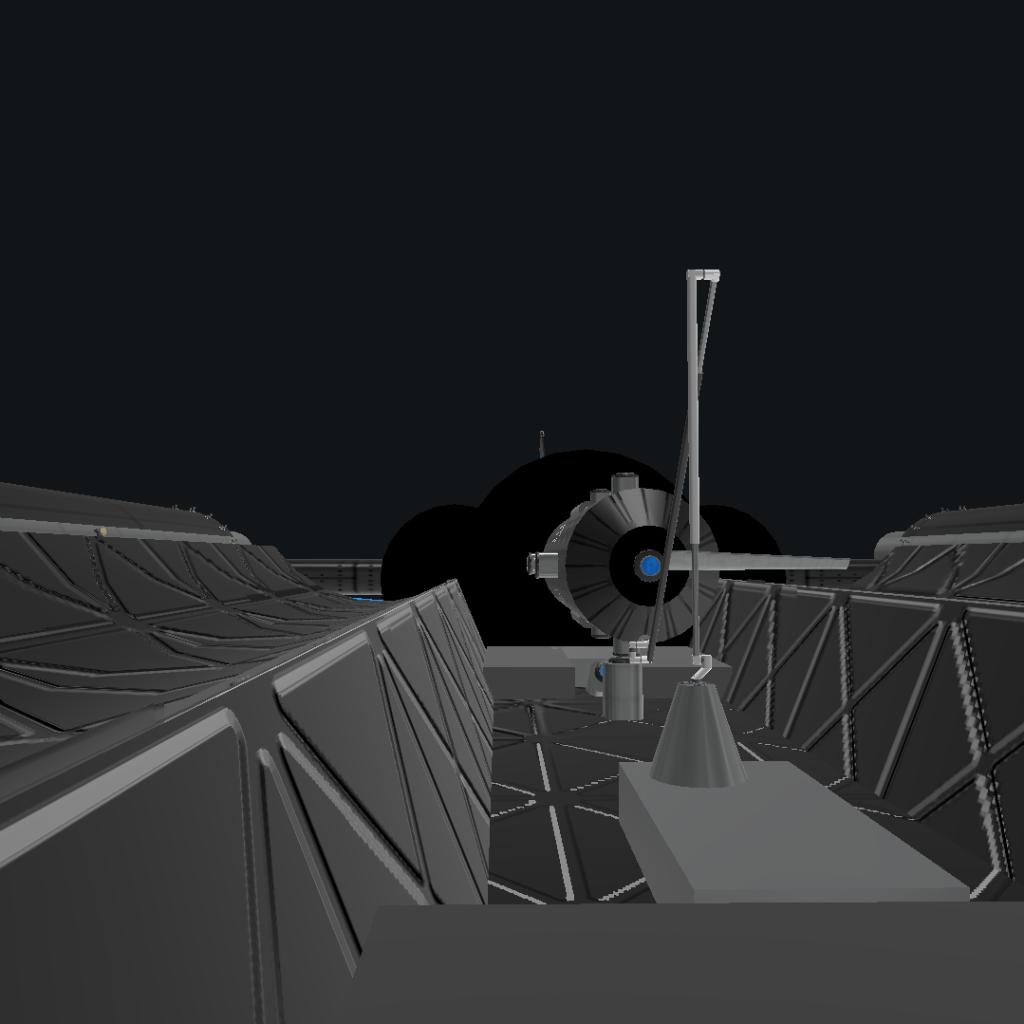
Just position the arm head at payload port ,
activate 4,5,7 ,easy pullback ,and deactivate 4,5 .to release the payload
from arm deactivate AG-7 too :) -

4 the robot arm
Controls are
Camera is docking view
—Ag1—Translate
Slider 1
Pitch
Roll
—Ag2—Tilt
Pitch
Roll
Yaw
——
This arm tracks x,y,z coordinates in space and keeps a constant angle of orientaton.