

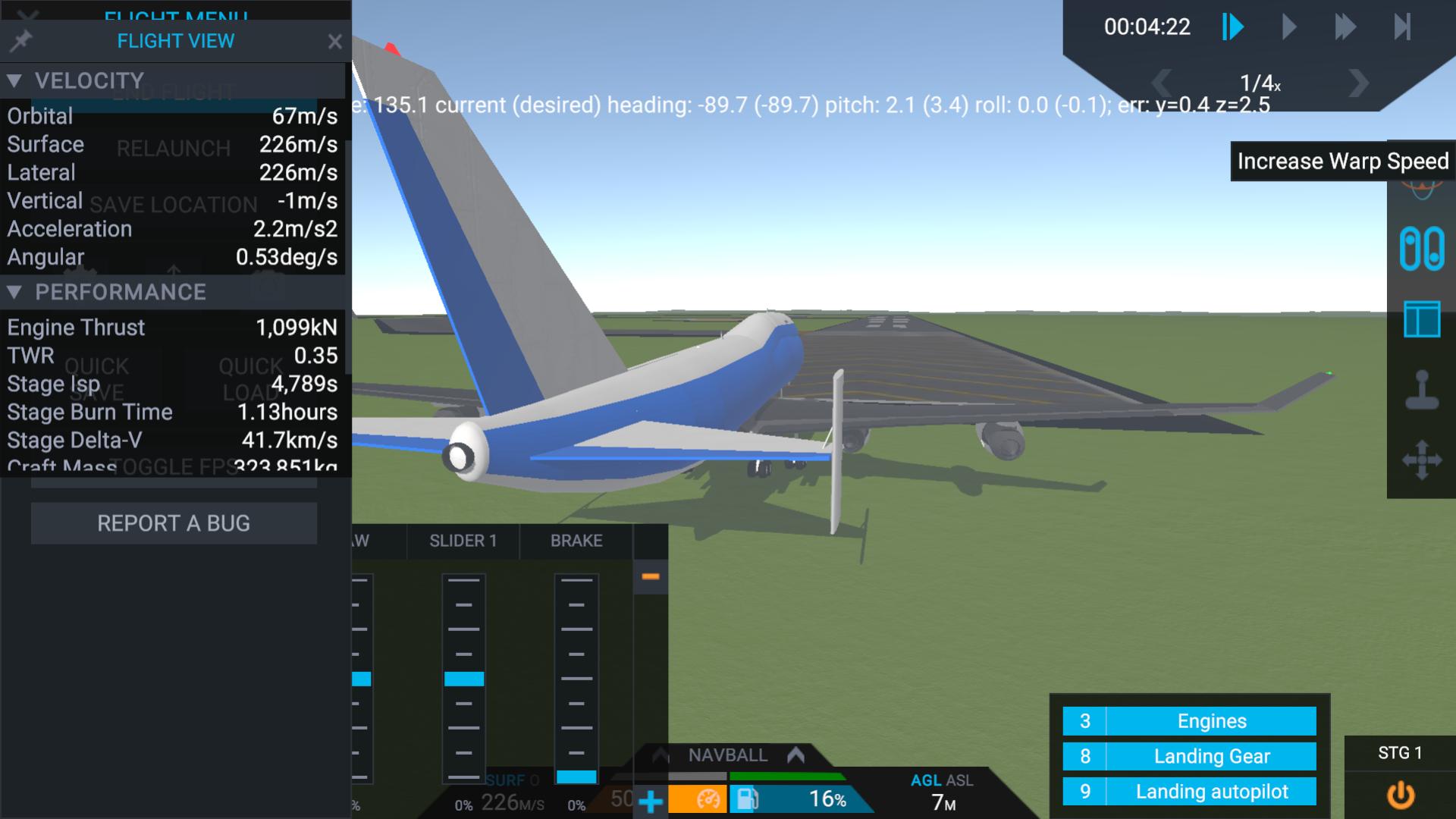

This craft has a landing program, activated by "Landing autopilot" AG. It controls roll, pitch and yaw input directly, without using built-in autopilot and it steers your craft to land safely on the runway. After touch down it starts breaking using reverse thrust in engines.
It is based on several PID controllers. Theoretically you should be able to use it with other craft, but probably you'll have to adjust some parameters in the code. I have adjusted them for this craft using many trial and errors. Those params depend heavily on particular craft aerodynamics characteristics.
I tested it only with this aircraft (SimpleAirways LGFix 3). For successful landing, make sure that:
- You set a reasonable initial throttle (my program reminds you to do this). I tested mostly 35% and 55% throttle. After increasing some PID coefficients, especially integrals in pitch PIDs (adjustment PID and input PID) it should be able to land, assuming initial position is like 10km from runway, with throttle 0% and flaps fully down (slider 1 at -100%). Feel free to experiment :)
- Initial position: it must be on the correct side of runway. Refer to "shuttle landing mission" to find out - in fact this is the starting position I tested mostly.
- It is able to land even from very far away from runway (I tested about 260km away).
How it works
- Basically it consists of 2 phases: "phase 1" maintains same altitude (ASL) until some distance to runway. It is not used at all for short distances.
- Main part is "phase 2": it descends to runway. It computes a fixed trajectory from initial position to runway. Then it tries to always follow this trajectory.
- It displays several information: in particular "err" indicates whether it should go in given direction (positive number) or in the opposite (negative number) where "y" is up and "z" is right, relative to runway, i.e. runway is reference for the terms "up" and "right".
- "Adjustment" PIDs (for pitch and heading) calculate which direction your craft should point at. In fact in early versions of the program, it passed these values to builtin autopilot.
- The builtin (in the game) autopilot is not very reliable: it doesn't control yaw at all (it affects turns) and may turn your craft upside down, leading to dive of your craft and potential crash.
- I replaced the builtin autopilot with my own that doesn't have above shortcomings.
GENERAL INFO
- Predecessor: Simple Airways 2
- Successors 1 craft(s)
- Created On: Android
- Game Version: 0.9.404.0
- Price: $151,305k
- Number of Parts: 168
- Dimensions: 19 m x 60 m x 66 m
PERFORMANCE
- Total Delta V: 0m/s
- Total Thrust: 0N
- Engines: 4
- Wet Mass: 3.25E+5kg
- Dry Mass: 1.32E+5kg
STAGES
| Stage | Engines | Delta V | Thrust | Burn | Mass |
|---|---|---|---|---|---|
| 1 | 4 | 0m/s | 0N | 0s | 3.25E+5kg |



5 Comments
- Log in to leave a comment
-
259 analyzer15.3 years ago
News: I have solved the bug mentioned below. Moreover, I've improved landing procedure a bit (can work as a glider) and I'm going to implement throttle control and perhaps a take-off program. Then I'll upload an updated program.
-
259 analyzer15.4 years ago
@Gio2020ITA Currently it's only for landing. Maybe I'll add take-off in future version. There is however another craft available that is a successor of SimpleAirways. I think the name was "SimpleAirways with take-off program". I downloaded it a few days ago and it seems to do the job. However my program is much more sophisticated :)
-

New release v2.0 is available. Still no take-off, but significant effort went for landing improvement. Follow redirect from this page.