
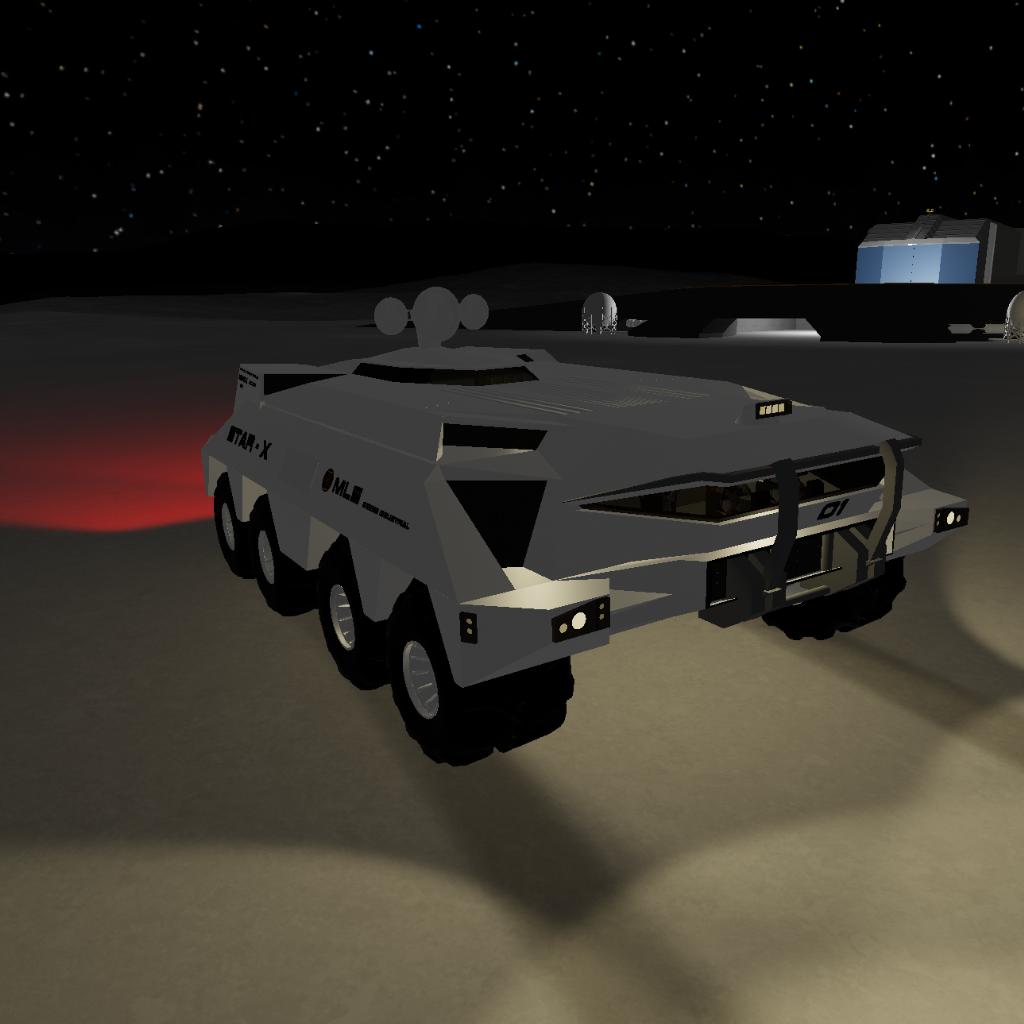


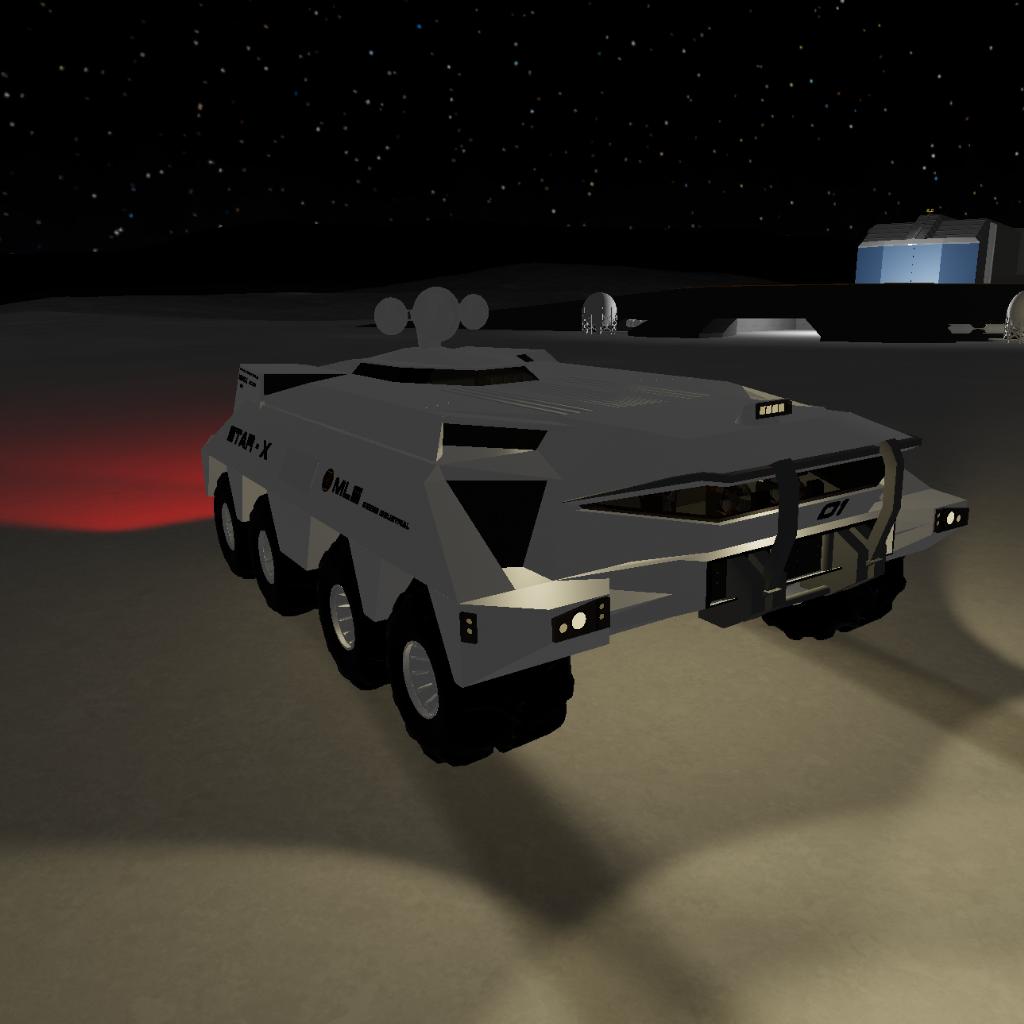

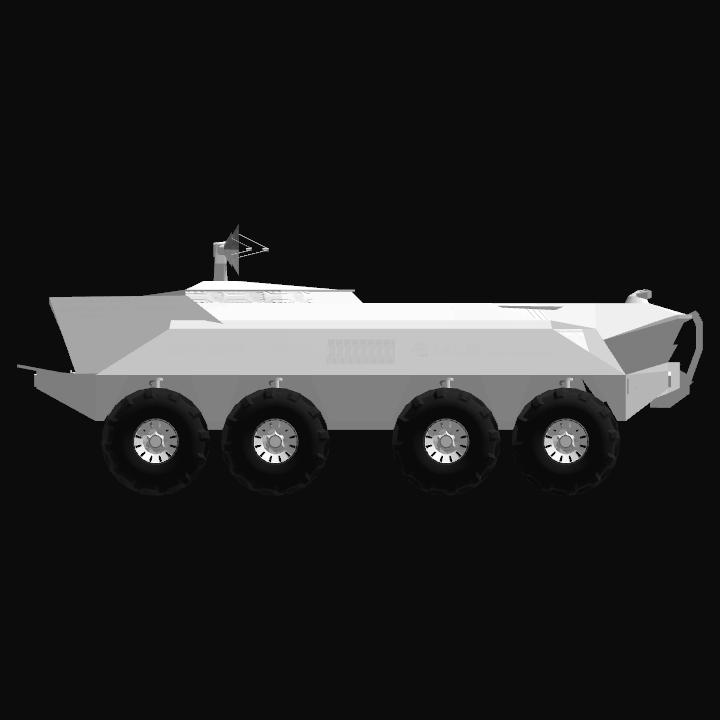
Mobile lab for colony science work/exploration.
Crew of 4 fully autonomous. Amphibious and submersable. Programable maintain a depth. Drills samples. Can be told to travel to a target or travel on a specific heading. Has great off road handling. Automatic stability control if its in liquid or becomes airborne.
-in autonoumous mode the MLS will decide where to go, is able to recognize good/rough/extreme terrain. Has obstacle avoidance. Automaticaly knows if its on land or in liquid. It will do its best to avoid driving into magma. Will scan for anomalies, drop a target when it finds one, travel to it and then drill a sample.
Action groups:
-AG1 - external lights
-AG2 - turret lights
-AG3 - internal lights
-AG4 - internal doors
-AG5 - cargo ramp
-AG6 - cargo lights
-AG7 - amphibious mode (automaticaly turned on/off by autopilot) not used by player
-AG8 - set depth (tell autopilot to hold a specific depth under liquid)
-AG9 - deploy drill
-AG10 - autonomous mode on/off
-AG11 - force autonomous mode to drive a specific heading (0 north 90 east -90 west 180 south)
-AG12 - tell autopilot to travel to a selected target.
Controls:
-Roll - turn left/right
-pitch - forward/reverse
-yaw - turn left/right in liquids
-slider 1 - turret up/down
-slider 2 - turret left/right
-slider 3 - comms array left/right
-slider 4 - amphibious mode forward reverse
-Translate up/up slider - ascend/descend in liquid.
Note: autonomous mode will travel on the seabed when in liquid. When driving manually if you are on the seabed (set the depth below the seabed or set translate up slider all the way down) it’s faster to use roll/pitch and drive along the seafloor than use the amphibious engines.
GENERAL INFO
- Created On: iOS
- Game Version: 1.3.204.1
- Price: $368,298k
- Number of Parts: 550
- Dimensions: 8 m x 12 m x 20 m
PERFORMANCE
- Total Delta V: 0m/s
- Total Thrust: 0N
- Engines: 0
- Wet Mass: 1.12E+5kg
- Dry Mass: 1.12E+5kg
STAGES
| Stage | Engines | Delta V | Thrust | Burn | Mass |
|---|
3 Comments
- Log in to leave a comment
-
-
5,197 Banic+2 5 months ago
I think I accidentally deleted this, when I was cleaning up redundant posts. So reposting it.

@AlexanderX thanks appreciate it.