




The first addition to my “Colonizing World’s” project. Everything I upload that starts with CW will be part of this project, and every addition to this project will be usable in career mode. The project’s goal will be to create a modular outpost, capable of assembly on any landable world. This will include the outpost modules, support vehicles, and interplanetary transport vehicles. The project is going to be fairly extensive and will take me a lot of time to complete. However, I will do my best to deliver within a timely basis.
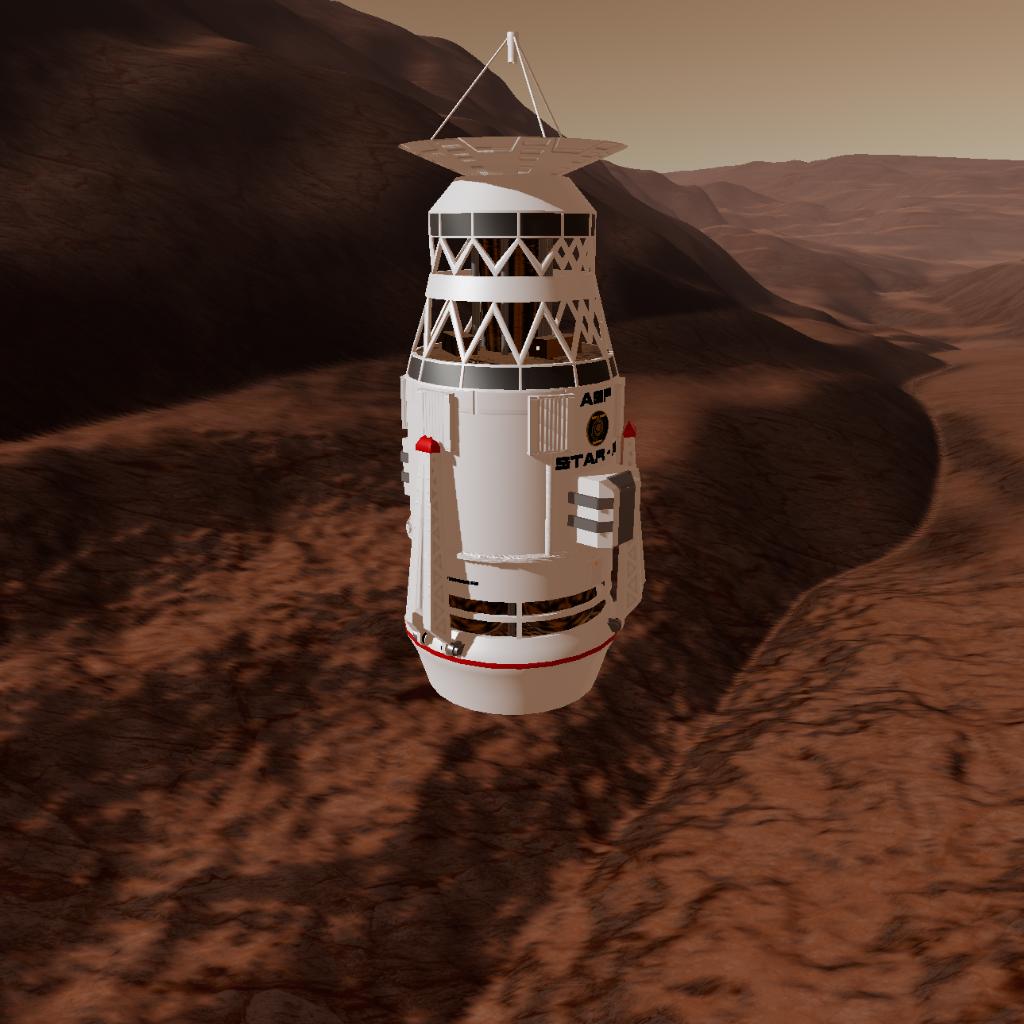
The colonizing worlds version of the ASP has many improvements, including greatly improved AI control over its thrusters, altitude and maneuvering. It now includes abort and recovery protocols if it gets itself into trouble. It is now capable of searching for appropriate landing sites on the terrain and will mark anomalies and landing sites with a target icon.
Probe features:
– will survey and explore planetary surfaces on its own
– scans the terrain for sutable landing sites, and places a target icon at anomolies/landing sites
– Will detect anomalies and travel to them for scanning
– probe will take/drill surface samples on land
– when over a liquid probe will descend to the surface and obtain a liquid sample
– Probe has intelligent, low terrain, and obstacle evasion capabilities
– Abort and recovery capability if the probe gets into trouble
– redundant landing site slope sensors. Probe will search for low slopes of it thinks a site is sketchy
– Can be sent to and land at a selected target
– Probe is capable enough to autonomously traverse the most rugged of terrain
– Probe is career mode, usable/friendly
– Low cost/launch fees. Small enough to be launched from the village pad.
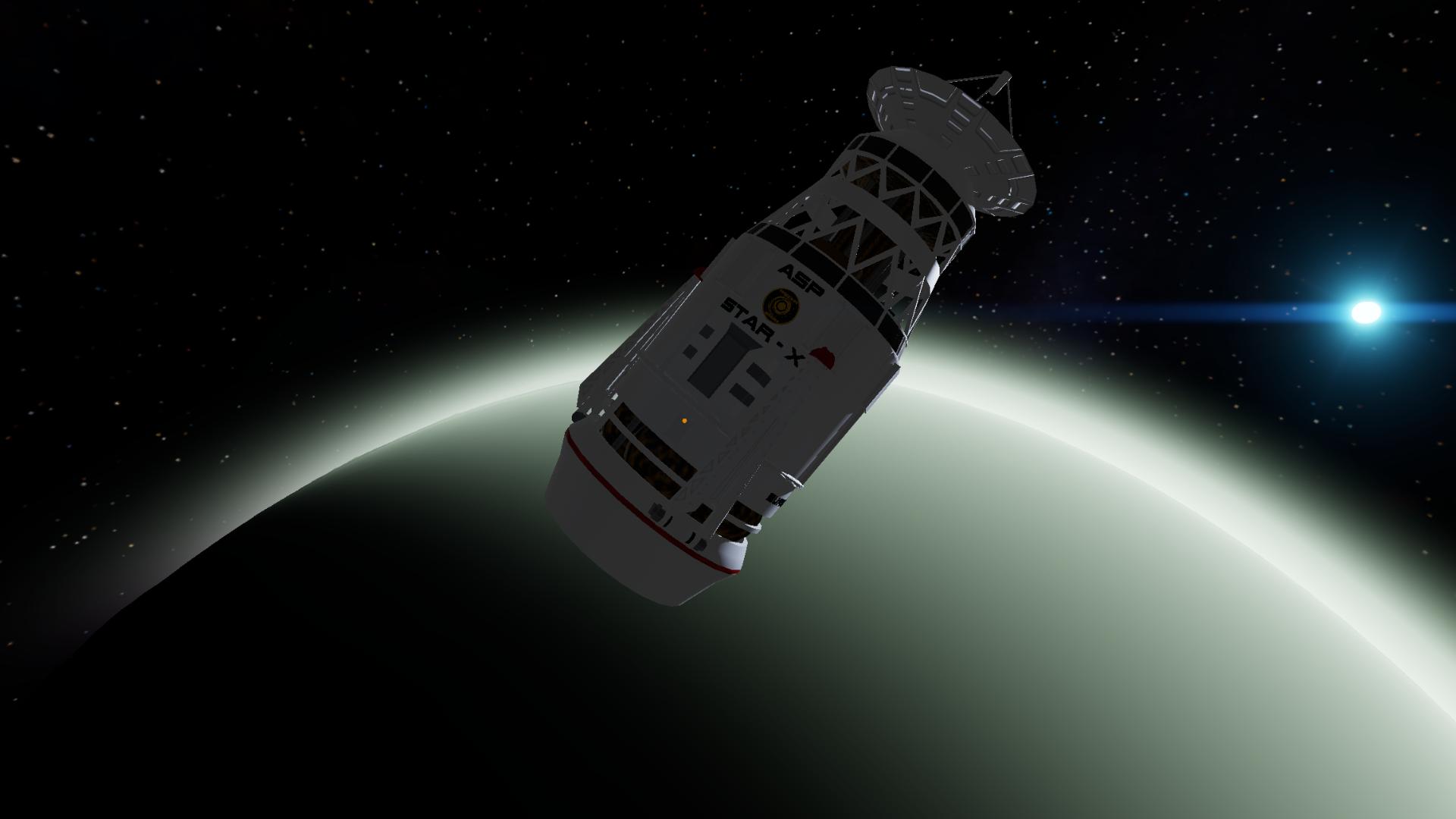
– probe is an SSTO and does not require a rocket for orbital insertion
Action groups:
AG1– primary engine on off
AG2–VTOL thrusters on off
AG3– hover assist on off (will maintain altitude which is changeable with slider1)
AG4– landing legs retract and extend
AG5– autonomous mode on and off
AG6– force a given heading while in autonomous mode (180 to -180 degrees, 0 is north, 90 is east, 180 is south, -90 is west) probe will still take samples and detect anomalies while traveling a forced direction) probe will now remember its forced heading if it deviates from it.
AG7– force a landing while in autonomous mode
AG8– tell probe to land at the selected target while in autonomous mode (not interplanetary travel). Probe will not take samples/detect anomalies in this mode. It will travel straight to the target and land.
AG9– solar panels extend and retract
AG10– planetary scanner (gives basic information on a planetary body that is currently targeted.)
AG11– lights
Manual controls :
– probe controls just like a rocket, when using primary engines for interplanetary travel, and orbiting, use the navigation wheels and primary engine.
– throttle is primary engine power
– Slider one is vertical thruster power used for VTOL and hovering
– Translation controls (same as RCS translation mode)
– Translate up, and down moves probe forward and reverse while in VTOL
– Translate left, and right moves probe left and right while in VTOL
– To rotate while in VTOL turn off translation and roll right will turn left. Roll left will turn right. (I know its counter intuitive but Due to the orientation of the ship, probe is ment for autonomous use, manual controls are secondary)
– yaw would cause the ship to tilt from side to side (not required) dont use yaw in VTOL)
– While using manually (in VTOL), turn on lock heading to keep the probe pointed up, you can also use the lock up function, however make sure you turn off the lock up function before putting the probe into autonomous mode. (lock up with fight the probe while acting autonomously)
Notes:
Probe will only act autonomously while on the surface of a planetary body. It will not autonomously travel between planets and moons. You will need to fly it to the destination, then get it down to the surface. Once on the surface autonomous mode can be turned on and the probe will do its thing.
When the probe is sent to a target, it will not take samples and it will not scan anomalies. It will travel straight from its current location to that target and land when it gets to the target. After it lands, it will wait. Two minutes, if no user input such as turning the probe off is given within those two minutes, the probe will go back to default, autonomous mode and begin to survey again.
GENERAL INFO
- Created On: iOS
- Game Version: 1.3.204.1
- Price: $3,590k
- Number of Parts: 164
- Dimensions: 6 m x 5 m x 4 m
PERFORMANCE
- Total Delta V: 13,983.6km/s
- Total Thrust: 700kN
- Engines: 9
- Wet Mass: 6,072kg
- Dry Mass: 5,877kg
STAGES
| Stage | Engines | Delta V | Thrust | Burn | Mass |
|---|---|---|---|---|---|
| 1 | 9 | 13,983.6km/s | 700kN | 1.38days | 6,072kg |

3 Comments
- Log in to leave a comment
-
5,197 Banic4 months ago
@Aludra877 I make a black and transparent background .PNG file in adobe. Then use this website to covert them to text for custom labels.
https://11qazxc.github.io/SPRASTER.html
-
27.3k Aludra8774 months ago
Wow! I love the emblem, its insane, how did you pull off the galaxy part?

@Banic nice, I will surely look at it when I have time, thanks brother!