
Work in progress.
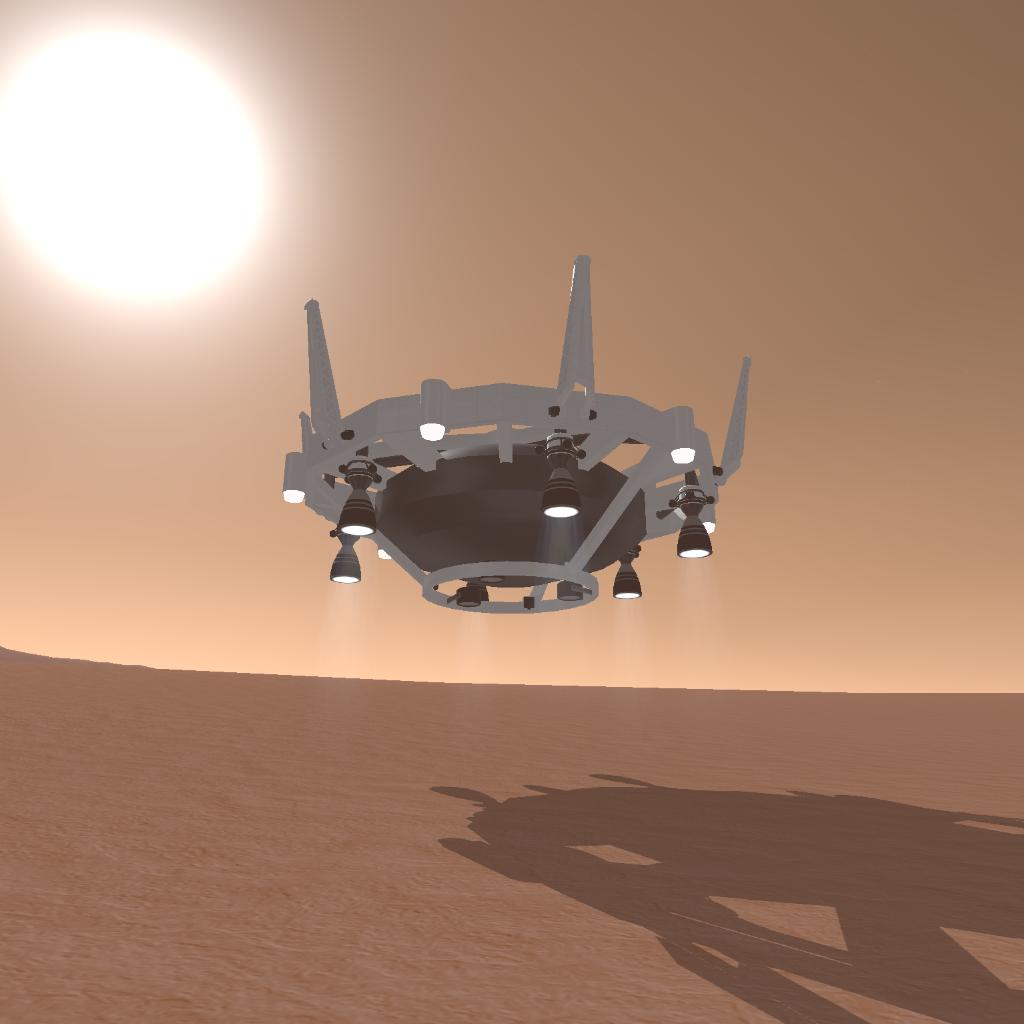
Attempts to maintain a constant altitude above ground level using a PID controller. The stabilisation of vertical velocity is based around a set algorithm, acknowledgments to pedro16797, the PID output feeds the algorithm an offset which raises or lowers the vertical velocity in response to the changing terrain.
The TWR in this configuration make it suitable for Luna or Cylero.
Translate Forward to lift off.
Translate Up/Down and Left/Right to manoeuvre.
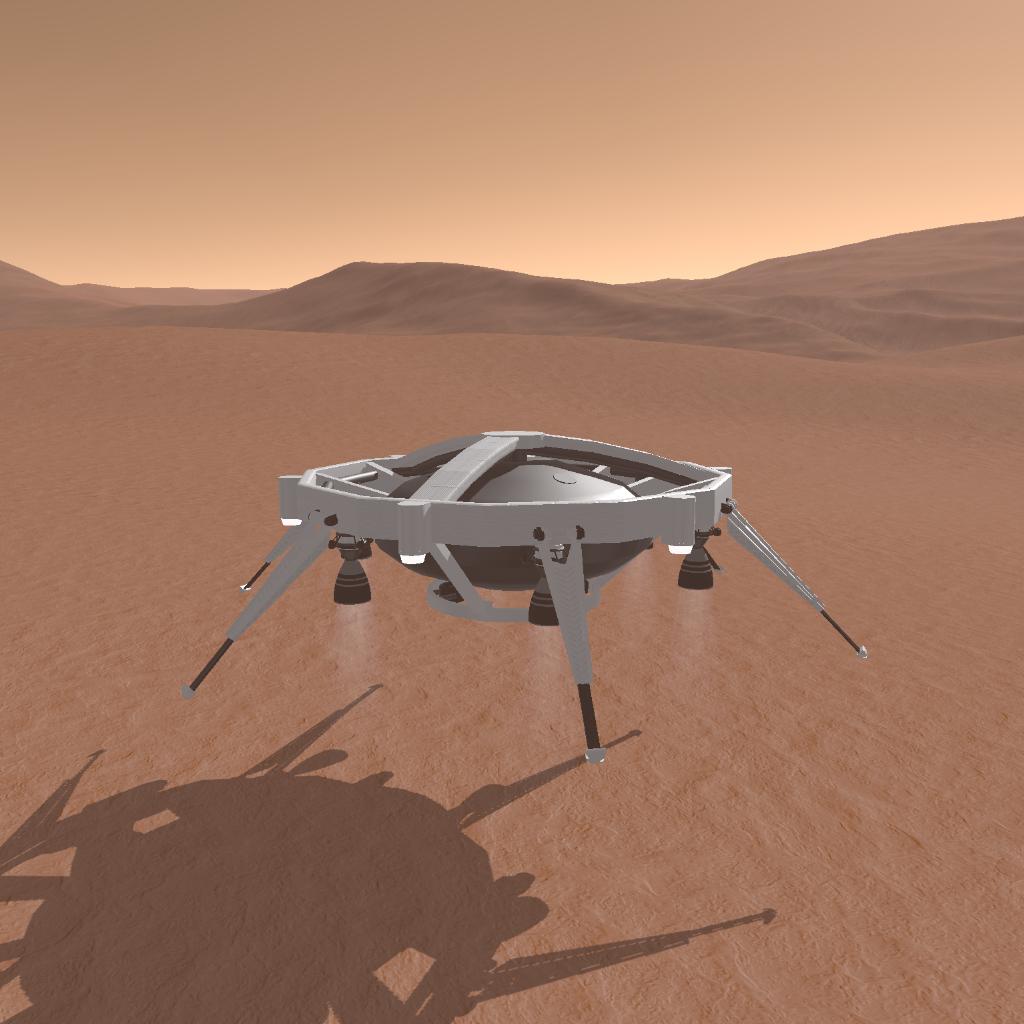
The legs are raised and lowered automatically dependent on lateral velocity. When the legs are lowered Translate Backwards will land the craft and switch off engines.
The AGL set points are determined in script by lateral velocity.
Brake Slider, proportional gain.
Slider 1, integral gain.
Slider 2, derivative gain.
Translate Forward also displays the PID gains.
The PID tunings are a rough guess, I’ve noticed on Luna a high derivative gain works well.
It’s not particularly accurate over difficult terrain at higher speeds, though is reasonably robust.
GENERAL INFO
- Predecessor: Vizzy PID controller test rig BETA
- Successors 2 craft(s)
- Created On: iOS
- Game Version: 0.8.402.0
- Price: $338k
- Number of Parts: 111
- Dimensions: 2 m x 4 m x 5 m
PERFORMANCE
- Total Delta V: 2.3km/s
- Total Thrust: 14kN
- Engines: 6
- Wet Mass: 3,299kg
- Dry Mass: 1,362kg
STAGES
| Stage | Engines | Delta V | Thrust | Burn | Mass |
|---|---|---|---|---|---|
| 2 | 6 | 2.3km/s | 14kN | 6.1m | 3,299kg |

16 Comments
- Log in to leave a comment
-
1,170 huuminberd6.2 years ago
@Jaime731 Cool, though I'm still experimenting with this, it's not as tight as I'd like.
-
-
8,523 crowxe6.2 years ago
@huuminberd cool :) I'll upload a video showing the demo test. It's beautiful to watch really . And thanks
-
1,170 huuminberd6.2 years ago
@crowxe Yeah the gravity velocity vector needs converting to length. It sounds interesting what you're doing, haven't had a chance to dig in yet. Feel free to public list it if your happy with, I'm not territorial 🙂. I was getting bored with the original test rig so that's why I built another model. It's just a platform to experiment with Vizzy control systems.
-
8,523 crowxe6.2 years ago
@huuminberd
Use on phone as the vizzy version used is the old one with normal gravity , not vector gravity -
8,523 crowxe6.2 years ago
@huuminberd
I've been busy with your craft even with the new vizzy (it messed up older program that uses "Gravity" and took me a while to figure out how to fix it) I made a program for your craft, it fly higher for safety (minimum 5m) because I like it fast , the best addition is the free fall safety with engines off and a suicide landing burn trigger so I don't have to worry when it's climbing up hill fast. The deadly maneuver for the craft is encountering a slope up hill while falling from a previous hillhttps://www.simplerockets.com/c/q92SmD/Hill-Rider
-
-
1,170 huuminberd6.2 years ago
@crowxe Ha, OK cool, I've just installed on windows and the translate forward doesn't seem to work for the conditional statement. Weird. Maybe me, haven't had more than a minute to look at it.
<2m/s setpoint is 2m2 and <10m/s setpoint 5m
10m/s setpoint 10m
Completely arbitrary. The maximum reasonable lateral speed depends on the terrain. Climbing in and out of steep gullies certainly less than 10m/s. Over marginally flat ground, whatever. Luna is more tricky than Cylero. The low gravity makes things very laggy. For Luna I'd maybe set the low fail and high fail thresholds further out. Maybe LF at 4, HF at - 10. -
8,523 crowxe6.2 years ago
@huuminberd
Alright, I tried. The controls are nice. I'm using it on phone for now. I don't know what's the targeted AGL though or the maximum reasonable lateral speed. I need those before I start testing the slides (which I'll be just playing around as I'm still not familiar with PID control aspects of this craft) -
1,170 huuminberd6.2 years ago
I've gotta say, this is quite a challenging scenario for PID control, it's just about adequate but can be defeated by various situations. I crudely implemented some failsafe 'out of range' exceptions, which takeover if the error gets too big. I'm thinking the thresholds might be a bit tight for Luna, which obviously plays very differently to Cylero. There might be a better way which involves scaling the PID gain based on error thresholds.
-
-
1,170 huuminberd6.2 years ago
@crowxe Sorry to ask but basics first, your not on Droo? There's not enough thrust for Droo.. I've just downloaded it into a fresh game, launch only Luna. It's working here. Translate Forward, not up, to lift off. I changed the controls around a bit from the test rig. Is the navsphere showing changes with the right stick? Curious.
-
8,523 crowxe6.2 years ago
@huuminberd
After pressing translation, the directions are not doing anything -
1,170 huuminberd6.2 years ago
@crowxe What happens so that you can't use the program, what's going wrong?
-
8,523 crowxe6.2 years ago
it's a beautiful craft, i couldnt use its program and i didn't give it some time to try again...i ran like crazy to check the script and when i failed to understand anything..i thought i'd make my own :) will share in a link



@huuminberd Certainly the PID control that i think is what you want to show here, meets the task... at least in high gain...