


**ASA-Styled, Smart 5-core booster, Manned Capsule, Support Tank, Lander, Robotic Arm
My first public listing, this is far from perfect, and I am sure people will find a bunch of bugs but I am fairly proud of it.
There's a lot to breakdown, so here we go:
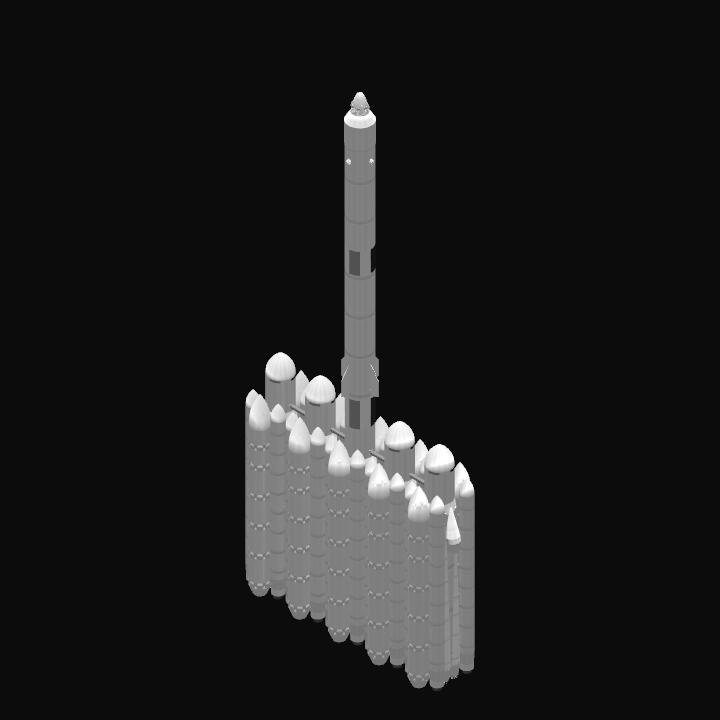
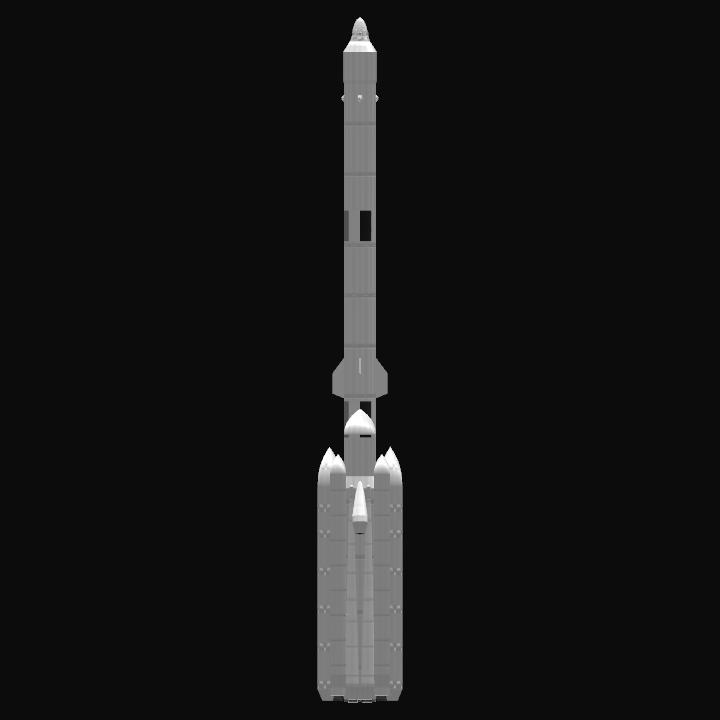
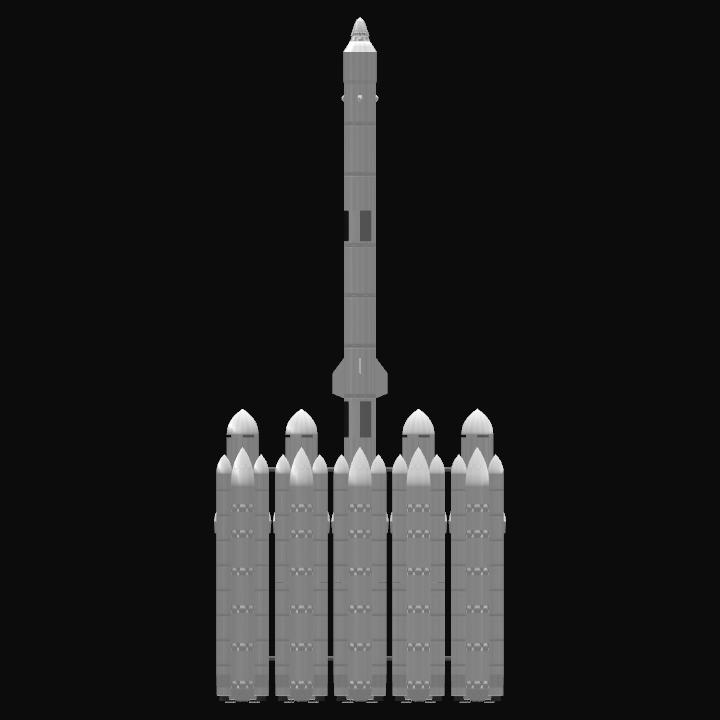
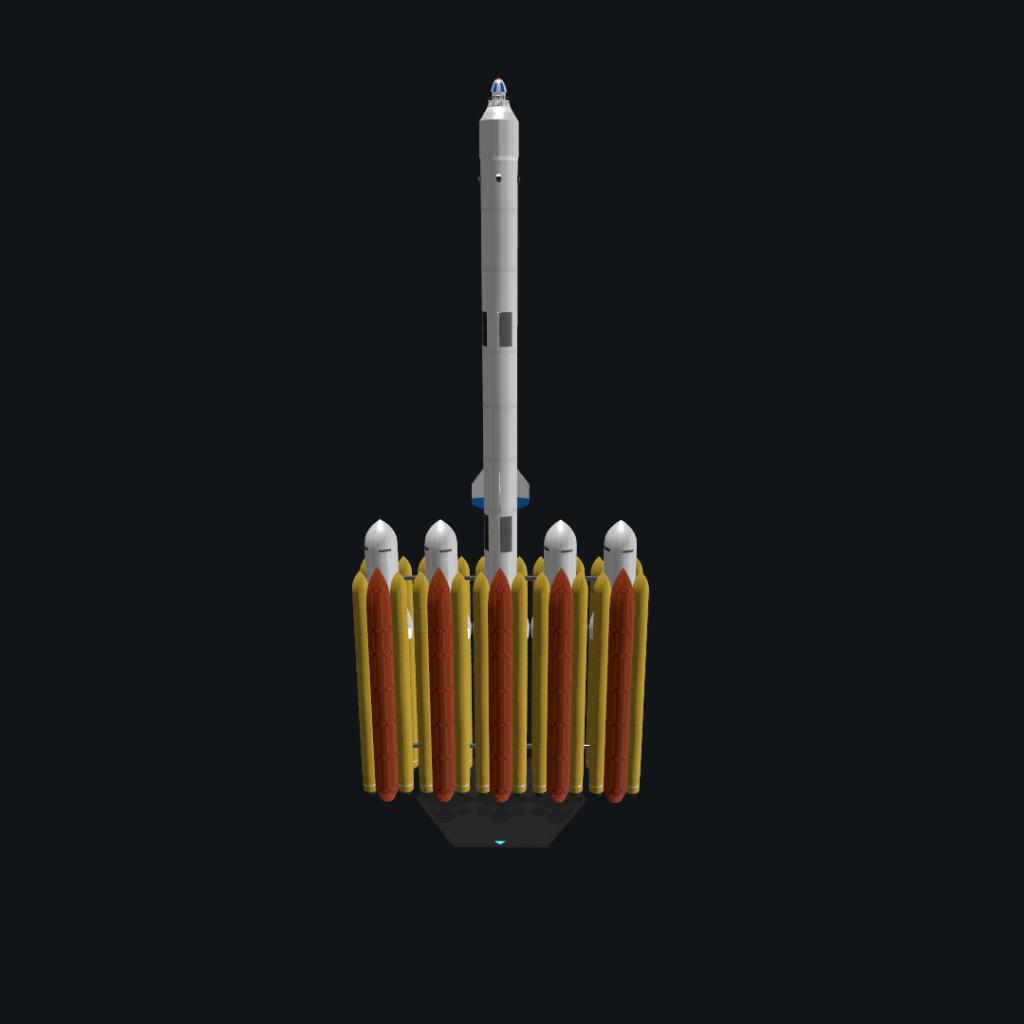
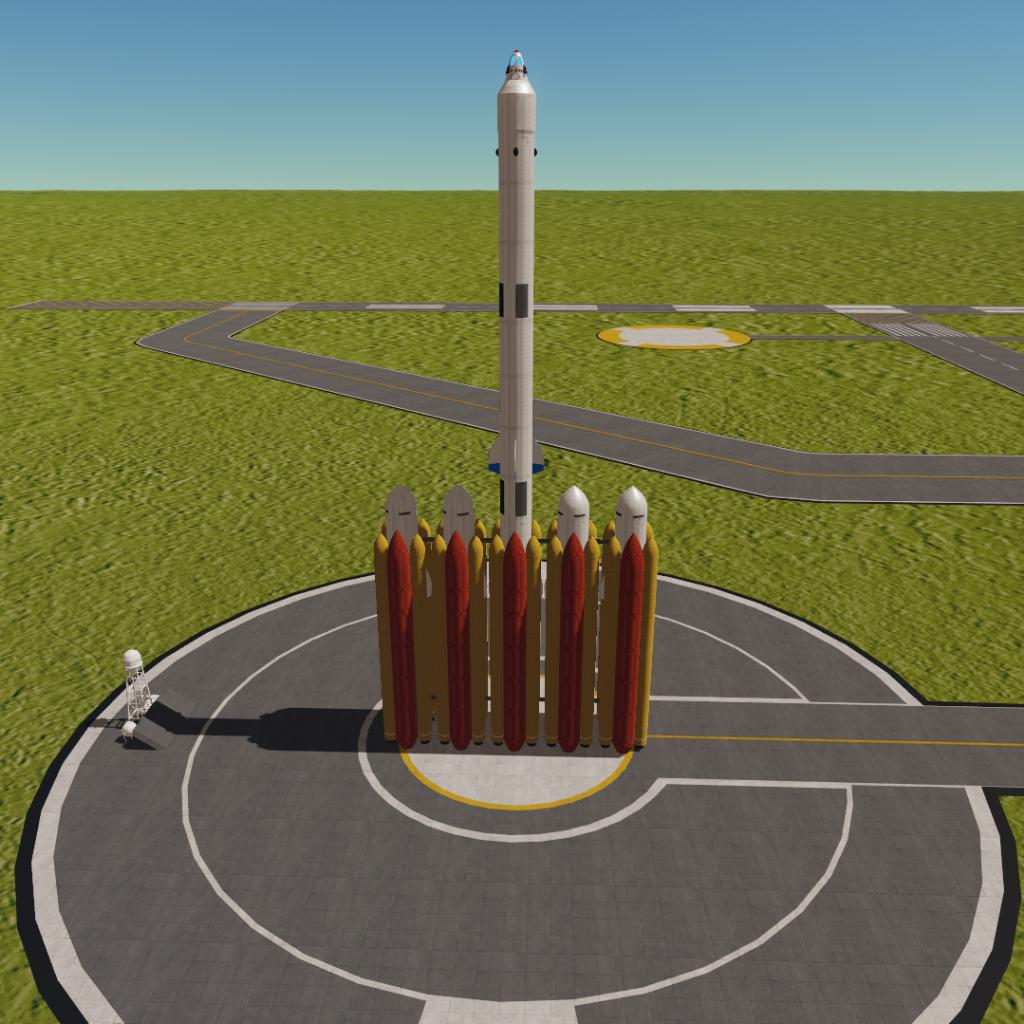
Main Booster:
The five main cores [white] (with external fuel tanks [red] and SRBs [yellow]) are all programmed together. External fuel tanks (EFTs) & SRBs will release automatically when empty (flight program was added to individual fuel tanks to broadcast when empty, and flight programs on each side interstage to read broadcasted messages and release). These interstages are not in their own "stages". Note: SRBs and EFTs have built in separation rocket motors and should propel themselves away from the craft. Next, the outer cores will drain of fuel and separate (automatically, with rocket assisted separators). This will happen for the 4 outside cores. This leaves the center core full of fuel. When the next stage is activated, the main core will boost away from the rest of the craft.
Note: Several AGs are used but not listed for this booster. Therefore, only free AGs while the booster is attached are the following: 5, 6, 8, 9 & 10
Upper stages:
Nothing really special - big fuel tanks and vacuum engines.
When the last large stage separates from the lander / capsule, take control of the "Landing Module".
Landing Module:
AG1: Engines (not a lot of fuel in this craft)
AG2: Slider 1 - Deploy Landing legs:
RCS: AG10
Solar Panels: AG9 (there is a battery and solar panels, but there isn't anything that uses power on the landing stage)
Once you are done with the lander, take control of the "Capsule Chip"
Manned Capsule (with support tank):
Capsule holds 7 crew.
The next stage activation available should separate manned capsule & tank from lander (do this with capsule engines powered on). There is more dV in this stage than is listed (the fuel in the support tank is not accounted for but will automatically refill the tanks in the capsule - increasing the shown dV).
The last stage separates the support tank from the capsule (do before entry, or when tank is empty). There are boostback motors, but I am not sure if they always work (should be an easy fix). The Capsule is balanced for mass and thrust in the center of the craft (the heavy batteries make up the crew's "display / console").
Capsule Activation Groups:
AG1: Abort : Should separate capsule from everything else with max power and turn on auto-landing sequence
AG2: Side Doors and Hatch : Slide 1 - Opens side doors : Slide 2 - opens docking hatch
AG3: Gyro : Oversized, much more affective than RCS on this unit, eats lots of power
AG4: Capsule Engines : 12 powerful aerospikes
AG5: Bay Deployment : Slide 1 - Opens belly bay doors : Slide 2 - Extends belly bay cargo (Currently outfitted with robotic arm, see below)
AG6: Docking Hatch : Experimental feature to make docking easier (see "EasyDock" below)
AG7: Solar Panels
AG8: Landing Springs : Slide 1 - Extends landing springs through heat shield : Slide 2 - extends additional docking port through heat shield
AG9: Auto landing sequence - only works on Droo / Earth
AG10: RCS
EasyHatch:
When activated, a piston extends a docking port with two "loose" hinges at the end. This should make docking a little easier, as the docking port should auto-align to the targeted port when close enough. After docked, deactivate the group; this will secure the docking port. Note: this has had varying stability with the docked craft. But this is very easy to swap out with a regular docking port if desired.
Robotic Arm:
When arm is outside of capsule bay: activate AG10, this will put the arm in an initial deployment position (Deactivate AG10 at any time to retract arm). Activating AG1 will allow control of fist section of the arm with quick, wide motions (use all inputs [Pitch, Roll, Throttle, Yaw, Slide 1, Slide 2] to control the different parts of the arm).
AG2 is the second section of the arm. AG3 is the same controls / parts as AG1, but allows slower, accurate positioning. The same goes for AG4 with respect to AG2.
The program will only allow one active AG between AG1 and AG4. The script will also save the positions of each AG, so the positioning will no be lost (unless the entire arm is retracted).
AG1: Group 1 - Fast Movement
AG2: Group 2 - Fast Movement
AG3: Group 1 - Slow Movement
AG4: Group 2 - Slow Movement
AG5: Do not use
AG6: Do not use
AG7: Do not use
AG8: Do not use
AG9: Lights
AG10: Deploy/Retract
As a modification note with the robotic arm: the arm is much more stable if the slow movement rotators are removed; however, control will be harder. Also, AG1 is linked to parts in AG5, AG2 is linked to AG6, AG3 to AG7, and AG 4 to AG7.
GENERAL INFO
- Created On: Windows
- Game Version: 0.9.307.0
- Price: $1,712,686k
- Number of Parts: 1574
- Dimensions: 171 m x 74 m x 21 m
PERFORMANCE
- Total Delta V: 12.4km/s
- Total Thrust: 648.8MN
- Engines: 155
- Wet Mass: 3.59E+7kg
- Dry Mass: 1.81E+6kg
STAGES
| Stage | Engines | Delta V | Thrust | Burn | Mass |
|---|---|---|---|---|---|
| 1 | 65 | 6.5km/s | 572.3MN | 3.2m | 3.59E+7kg |
| 3 | 3 | 2.9km/s | 16.9MN | 2.8m | 1.49E+6kg |
| 6 | 1 | 3.0km/s | 7.0MN | 2.7m | 5.37E+5kg |