
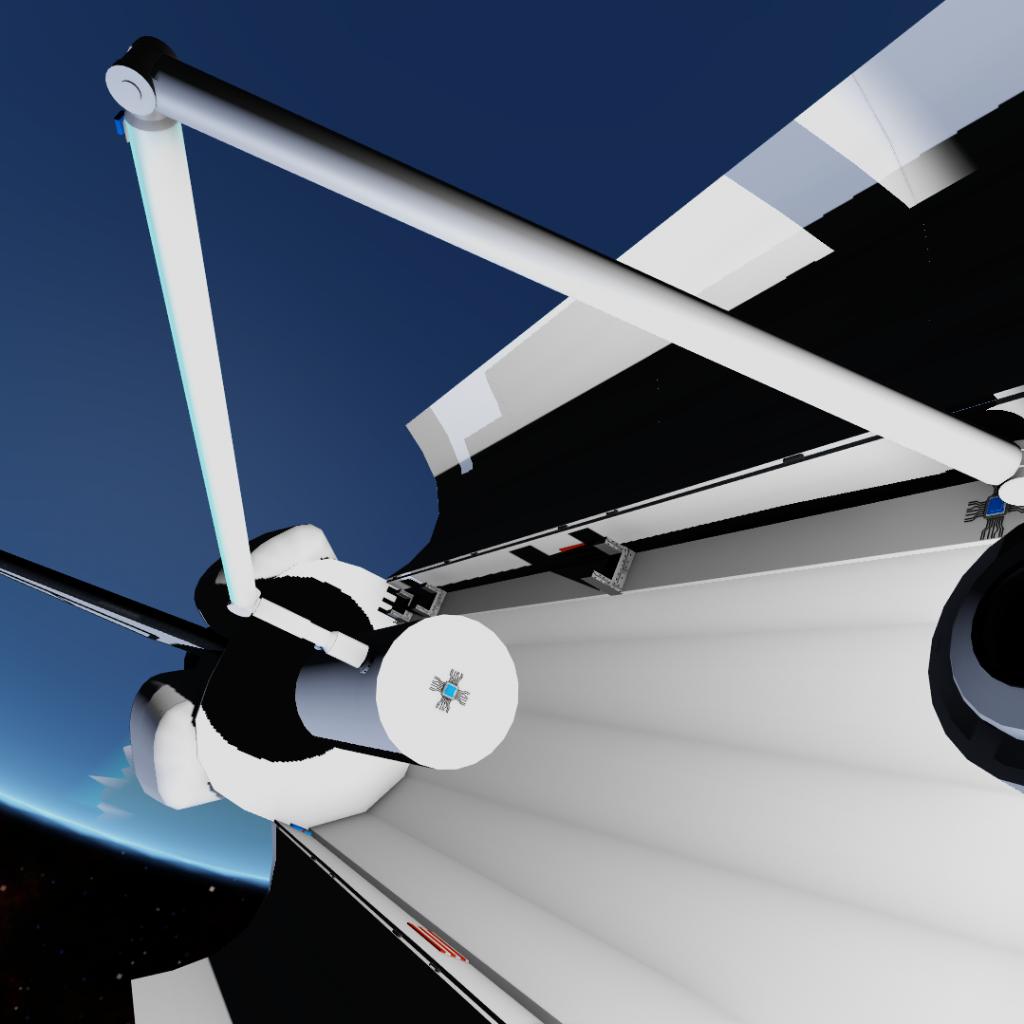

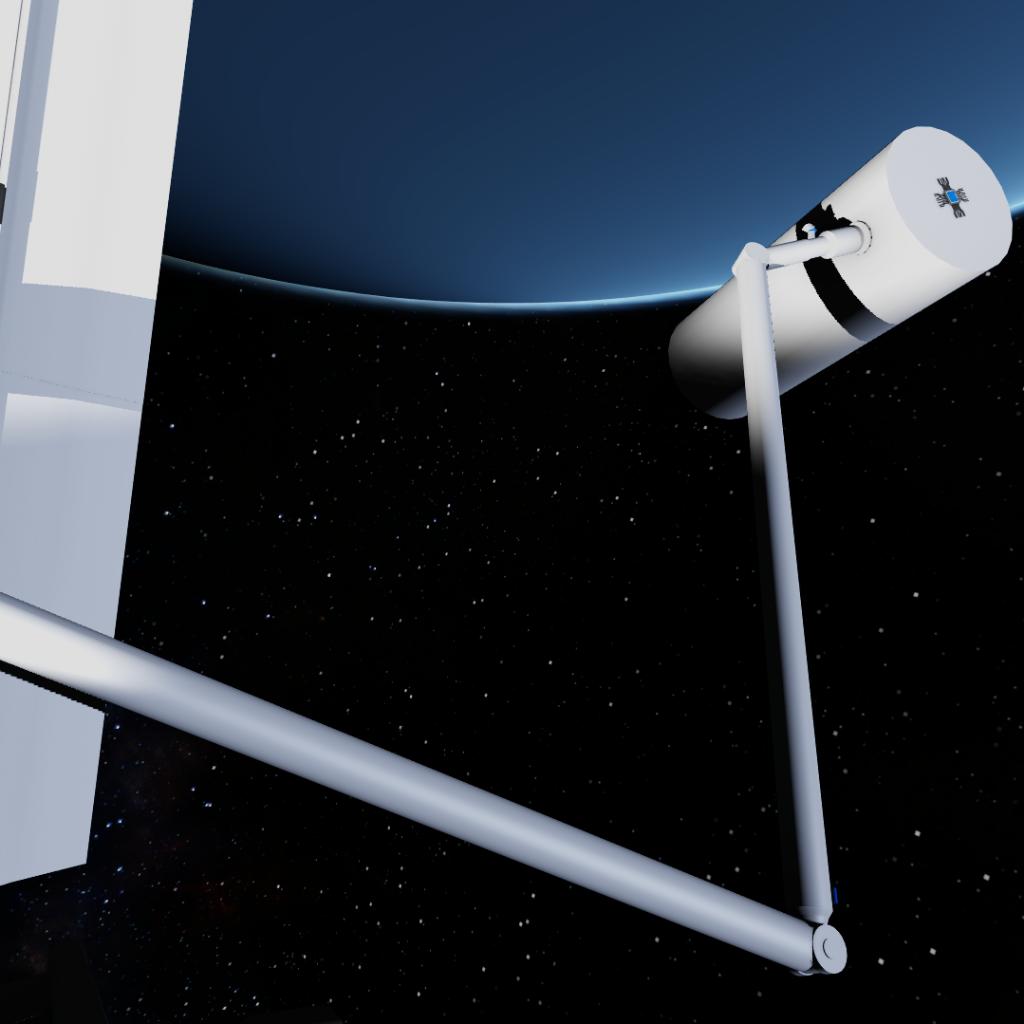
Canadarm with modified spherical wrist arrangement (lack of knowledge)
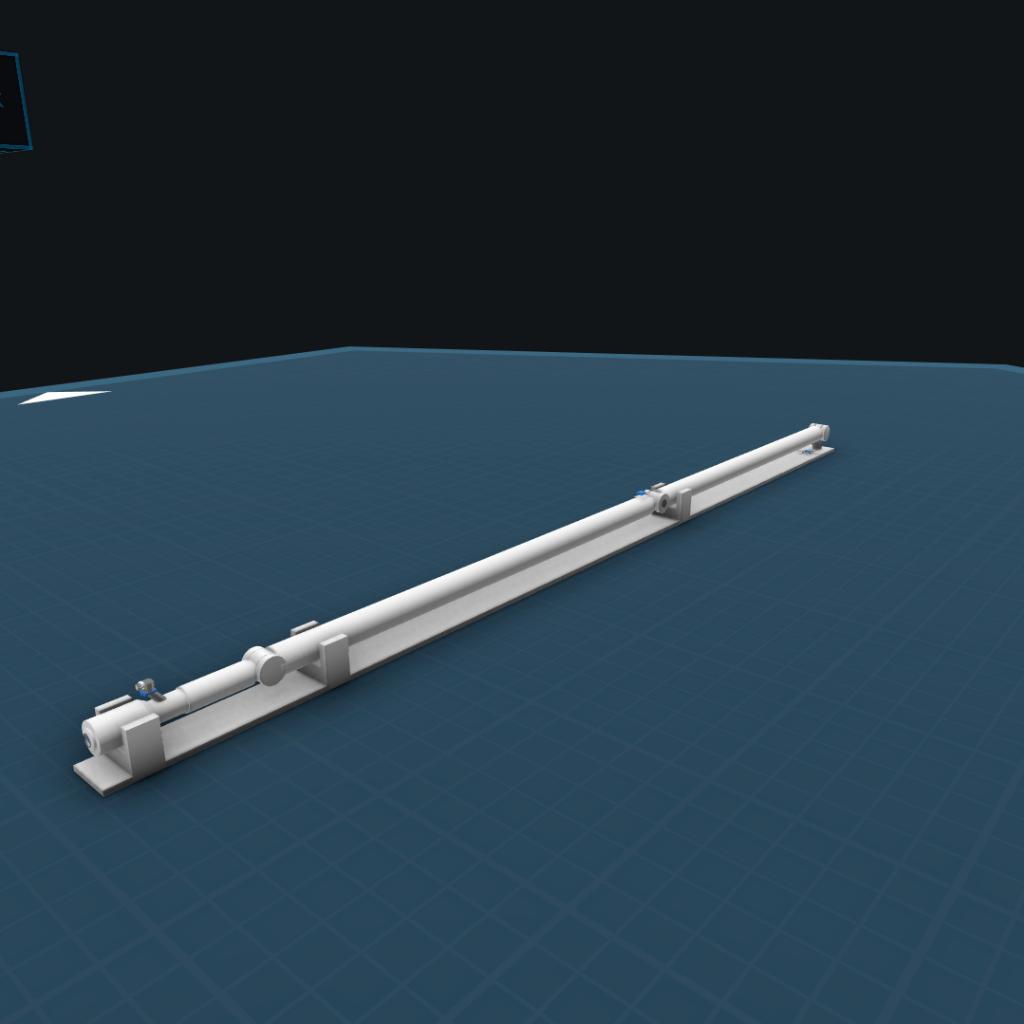
Canadarm Without Base
Select the command chip to control (if put on other craft)
How To Use:
- Take control of the arm and activate AG1
- AG 2 for translation and AG3 for Orientation.
- Choose a Docking port [target] and activate AG4 for auto mode.(only work for this orientation)
- AG 5 for setting.
- Set Translation speed
- Set Orientation speed
- Set Tool Center Point
If you want to replace the docking port with improved docking port(mod) please rename to "Head"
GENERAL INFO
- Successors 1 craft(s)
- Created On: Windows
- Game Version: 1.0.8.0
- Price: $47k
- Number of Parts: 53
- Dimensions: 1 m x 16 m x 1 m
PERFORMANCE
- Total Delta V: 0m/s
- Total Thrust: 0N
- Engines: 0
- Wet Mass: 2,162kg
- Dry Mass: 2,162kg
STAGES
| Stage | Engines | Delta V | Thrust | Burn | Mass |
|---|

13 Comments
- Log in to leave a comment
-
2,811 llwei971.6 years ago
@OrionCX the easiest way is to start from basic and easy project, check the default program by loading the program in vizzy. If there is any questions, you can join jcs discord and ask in vizzy channel.
-
-
270 CFXA1.6 years ago
@llwei97 IG, I found a dumb way to make it work...Barely. So it is stable in these settings:
Transitional speed: 0.005
Orientation speed: 0.1Link: https://www.simplerockets.com/c/4NOjD3/TEST-CRAFT-SPACE-STATION-ONE
Edit: I tried berthing a test space-craft, it worked pretty good
-
2,811 llwei971.6 years ago
@OrionCX the reason why it broke is because you changed the configuration of the arm which changes the whole transformation of the robotic arm. There is no easy way to resolve it. The auto targeting need rework since this was done when im still new to the game.
-
270 CFXA1.6 years ago
Also it would be a great help if you test this unfinished version of my modified version of your candarm and help me resolve few problems...
- Orientation control also controls the Transitional movement too
- Orientation control is not possible..
- Auto targeting not working (optional to resolve)
pls help!!!!
Link: https://www.simplerockets.com/c/57NP74/CANADARM-2-TEST
-
270 CFXA1.6 years ago
Hi bro, me again, I modified it into Canadarm 2, with inchworm and double LEE, i am uploading the craft soon, also will be making a yt video, will make sure to credit to original creator, THX for your beautiful work!!!
Edit:
Its just that the auto targeting doesn't work, otherwise manual works well after the modifications.... -
-
-
270 CFXA1.8 years ago
Hi bro, I love your Craft, and i have been wanting to make something like this for a long time, and I would like like to use it in my Craft, I ill be modifying it a Bit, I ill make sure to credit you for the original work on the vizzy and building, Also ill be uploading a video about it in YT channel, need your approval Thankyou!!!!!!
-
-
1,447 Pepethecat3.0 years ago
Hey do you happen to have a place where I can contact you like discord? If possible I'd like to ask for you help on robotic arms.
-



@llwei97 surr, I will try