
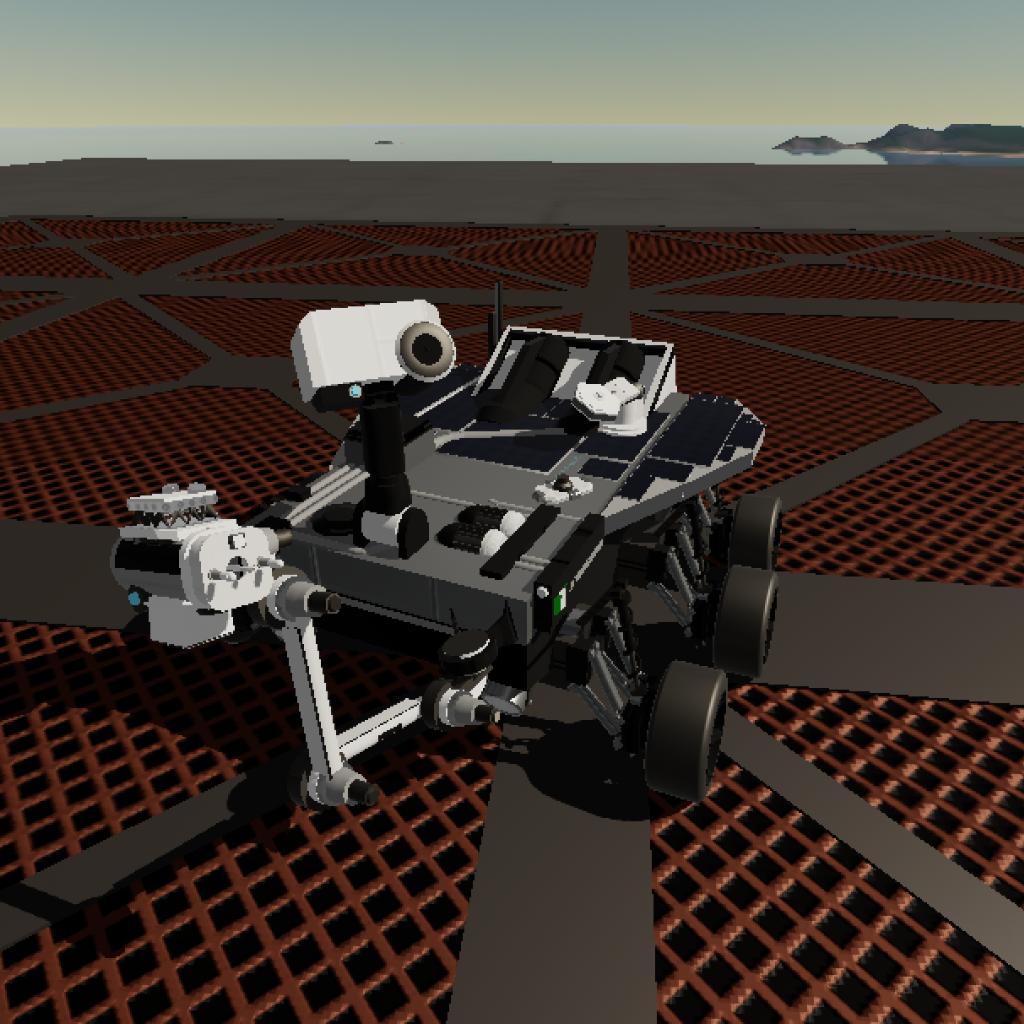

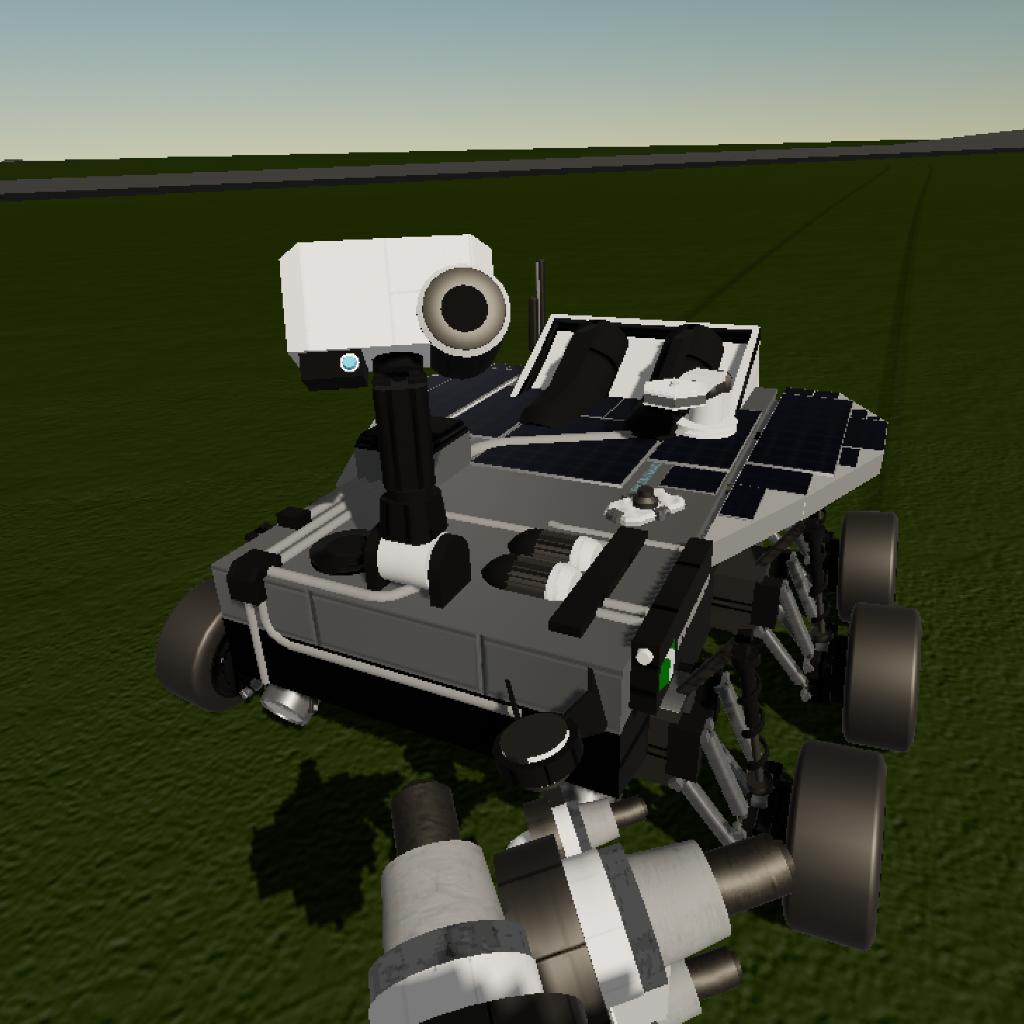



After weeks of R&D on the concept of the 'Rover' (and much inspiration from Percy) I have designed and manufactured my very own rover......NEORIZON
A lot of work has been put into this machine but admittedly, I spent much more time on the design than the engineering as you will find out :)
Nevertheless you will undoubtedly look "cool" roving through the terrain of Luna, Cylero and Beyond....
Now the part you'll actually read......
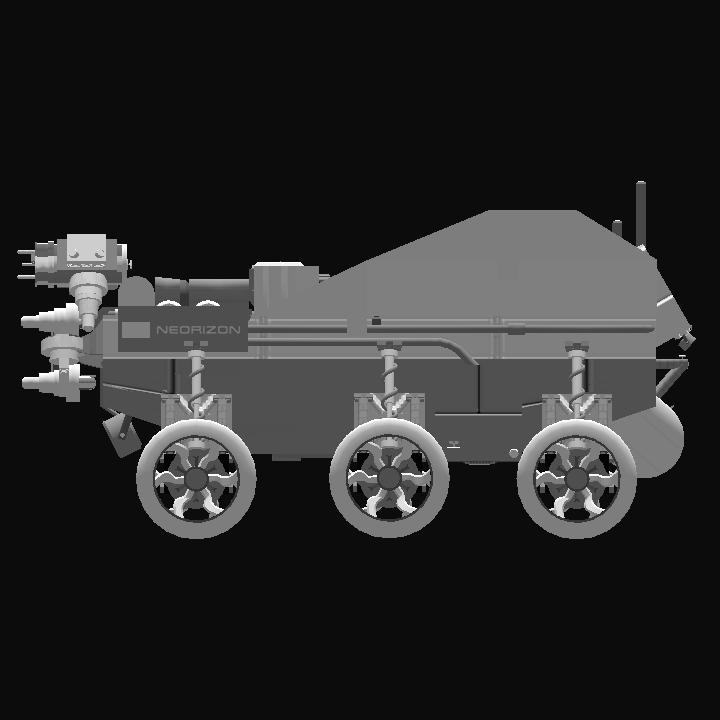
AG1 - Suspension (not a rocker-bogie system, it tends to lean to one side so Slider 1 to the lowest -100% for a while should balance it out)
AG2 - Motor (self implied, use Throttle and Pitch [for reversing])
AG3 - Solar Wings (patent pending....use Slider 1 to the lowest -100% to deploy, then Slider 2 to angle the wings for better sunlight exposure (do not increase Sliders higher than 0%, can cause irreversible damage)
AG4 - Mast Control (use Slider 1 at 100% to deploy the mast, Slider 2 to swivel)
AG5 - Kranium (use Slider 1 to tilt the rover 'head')
AG6 - Extendo (use Slider 1 to extend the arm of the Turret, use Slider 2 for the furthest elbow and Throttle for the 2nd.....if that makes any sense)
AG7 - Turret (use Slider 1 & 2 for full Turret control and Throttle for the drill)
AG8 - Electronics (Use Slider 1 & 2 to control the 'InstruGram' camera
AG9 - Lights
AG10 - Cargo bay door (contains 3 'DiagnoBot' these are deployed by Stage activation 1, 2, 3, they are used to survey the rover and analyze any hardware problem, wouldnt make sense to deploy all three at once, I recommend being in little motion when deploying)
Note: Neo has 'Vita' bulbs to show which parts are currently activated.
Disclaimer!!
1. Do Not Activate Two Groups At Once, may cause clashing of functions.
2. NEORIZON is not built for speeds higher than 20m/s
Other disclaimers will added.....when I remember them
Hope you enjoy the craft as much as I did building it.
Onwards, Upwards, Always Higher!!
GENERAL INFO
- Successors 1 craft(s)
- Created On: Android
- Game Version: 0.9.614.0
- Price: $4,148k
- Number of Parts: 556
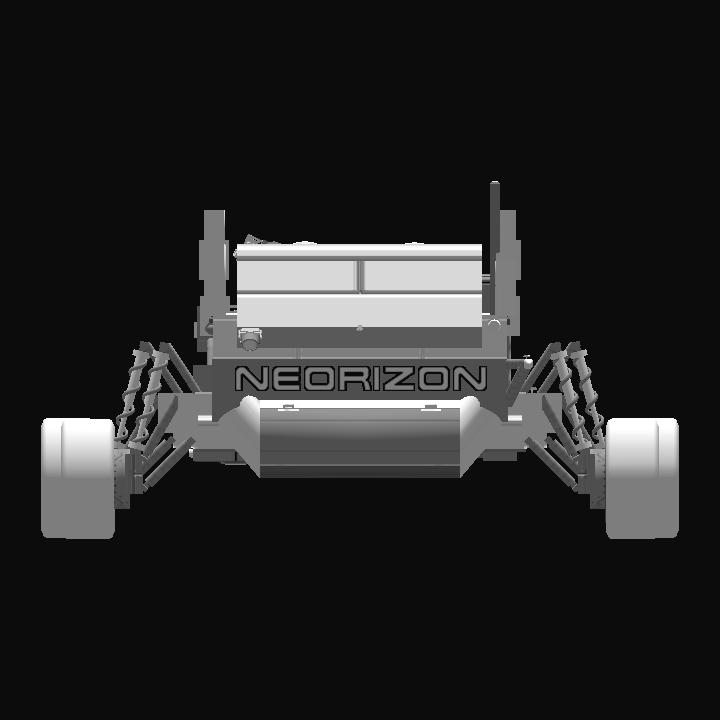
- Dimensions: 2 m x 3 m x 3 m
PERFORMANCE
- Total Delta V: 0m/s
- Total Thrust: 0N
- Engines: 0
- Wet Mass: 7,566kg
- Dry Mass: 5,285kg
STAGES
| Stage | Engines | Delta V | Thrust | Burn | Mass |
|---|

it should be called TML but i still like it
Can you make a landing system?
Nice detailing bro
I will make my rover.......
Inspired by you
😅😅
@OrbitalGarage I have uploaded the video. Sorry it was late. I was facing some problems with my device so I wasn't able to upload early. U can check it out on my yt channel when u get time. Cya.
@OrbitalGarage I'm making the rocket. It'll take a bit of time. I'll upload soon.
@OrbitalGarage Thanks.
I went from 40 to 570 points on this craft alone, im grateful.
We did it and then some!! 🤝🏾
@SuperionSpaceProgram almost 🤞🏾
Almost 30 upvotes
almost forgot to upvote
Wow!
Give this player a upvote
Good job!
@OrbitalGarage cool!
Cool!
@SuperionSpaceProgram go for it, i wanna see.
@TheMrTuts subscribed. :)
Can i make a rocket with these craft?
@Blakkkboy Thank you a lot! My YouTube channel name is: The Mr Tuts.
I will upload a vid using this after one that I'm making right now. And again, thanks a lot.
@TheMrTuts by all means, it would mean a lot, send me the link. :)
Hey! Your craft is amazing! Can I use it in one of my videos? Hope you'll allow me to do so.
Very nicely done
This needs more than 30 upvotes
@Tigerflakes fashoo, working on it.